

激光测距仪
激光测距仪
时间:2023年05月16日
分享 :










激光测距仪,是利用调制激光的某个参数实现对目标的距离测量的仪器,它重量轻、体积小、操作简单速度快而准确,其误差仅为其它光学测距仪的五分之一到数百分之一。世界上第一台激光器,是由美国休斯飞机公司的科学家梅曼于1960年,首先研制成功的红宝石激光器。美国军方很快就在此基础上开展了对军用激光装置的研究。1961年,第一台军用激光 测距仪通过了美国军方论证试验,对此后激光测距仪很快就进入了实用阶段。由于激光测距仪价格不断下调,工业上也逐渐开始使用激光测距仪。国内外出现了一批新型的具有测距快、体积小、性能可靠等优点的微型测距仪,可以广泛应用于工业测控、矿山、港口等领域。
激光测距仪的原理
一、 相位法激光测距技术原理:
当今市场上主流的激光测距仪是基于相位法的激光测距仪。这是因为基于相位法的激光测距仪轻易地就可以克服超声波测距的一大缺陷:误差过大,使测量精度达到毫米级别。而基于此法的激光测距仪主要的缺点在于电路复杂、作用距离较短(一百米左右,经过众多科学工作者的努力,现在也有作用距离在几百米的相位法激光测距仪)。
相位法激光测距技术,是采用无线电波段频率的激光,进行幅度调制并将正弦调制光往返测距仪与目标物间距离所产生的相位差测定,根据调制光的波长和频率,换算出激光飞行时间,再依次计算出待测距离。该方法一般需要在待测物处放置反射镜,将激光原路反射回激光测距仪,由接收模块的鉴波器进行接收处理。也就是说,该方法是一种有合作目标要求的被动式激光测距技术。如下图所示:
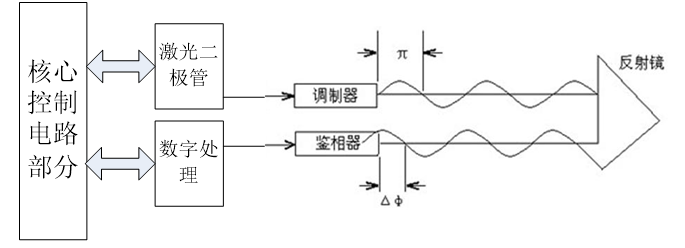
由图所显示的关系,我们可以知道,用正弦信号调制发射信号的幅度,通过检测从目标反射的回波信号与发射信号之间的相移φ,通过计算即可以得到待测距离。
ΔD=ct/2 ①
t=φ/ω ②
又有ω=2nf ③
φ=N+Δφ ④
即D=(N+Δφ) *c/(4nf) ⑤
其中,D是待测距离,也即测距仪与目标物间距离;
C是光速,等于299792458m/s(假设光速未受环境影响);
t是往返测距仪与目标物间距离一次的时间;
φ是激光光束往返一次后所形成的相位差;
Δφ是激光光束往返一次后所形成的相位差不足半波长的部分;
N是相位差中半波长的个数;
ω是调制信号的角频率。
由于N的个数在激光飞行之后并不能确定,所以这就导致了基于相位法的激光测距仪只能测定Δφ,相位差中不足半波长的部分。这就形成了相位法的内伤:最长作用距离固定,由调制光的波长决定。但是从另一方面看,相位法激光测距仪可以准确地测量半个波长内的相位差,这也成就了相位法激光测距仪最为突出的优点:测量精度高,可达到毫米级别。
二、 脉冲法激光测距技术原理:
相位法与超声波测速测距所用方法相类似,最大测量距离通常为几百米,能较容易达到毫米的数量级,但是按照该方法设计的测距仪的最大测量距离是受到限制的,不可扩展。该方法主要在国外应用较广。而脉冲法激光测距一般采用红外激光,包括近红外激光和中红外激光。该波段激光有可见和非可见之分。且基于此技术的测距仪对相干性要求低、速度快、实现结构简单、峰值输出功率高、重复频率高且范围大,所以此项目使用的是脉冲方法设计手持激光测距仪。脉冲法激光测距的原理是:
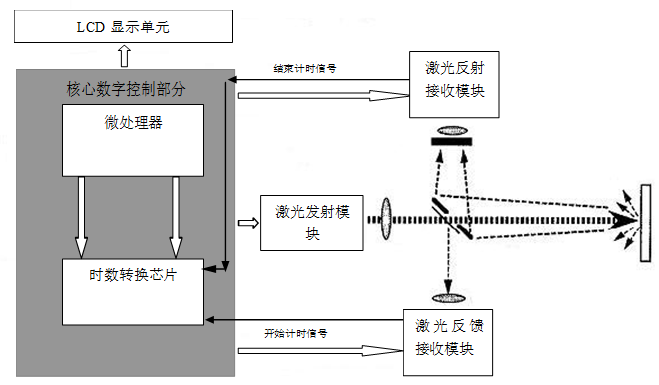
如上图,激光测距设备对准测量目标——Target,发送光脉冲,光脉冲在经过光学镜头时,一束被透镜前的平面镜反射,进入激光反馈计时模块,经光电转换及放大滤波整流后,电平信号送入时间数字转换芯片的开始计时端;另一束激光脉冲经过透镜压缩发散角后,开始飞行,遇到目标障碍物后发生漫反射,部分激光返回到激光接收处理电路,同样地,经过光电转换及放大滤波整流后,所形成的电平信号送入时间数字转换芯片结束计时端,即完成整个测量过程。
其中,设D为待测距离,
T为往返测量点与待测物间距离所用时间,
C为激光在空气中传播的速度(假设已设置测量的环境参数),
n为测量时大气折射率,那么,易得:
D=CT/2n
非常简单地,我们把对距离的测量转变为对时间差的测量,所以,在脉冲式激光测距中,需要测量的只是发射与接收激光的时间间隔、受环境因素影响的大气折射率、环境参数及激光传播速度。这就是脉冲式测距的理论原理。
作者:FATRI
链接:https://www.zhihu.com/question/272174742/answer/367424455
来源:知乎